Delaunay 三角剖分简介
定义
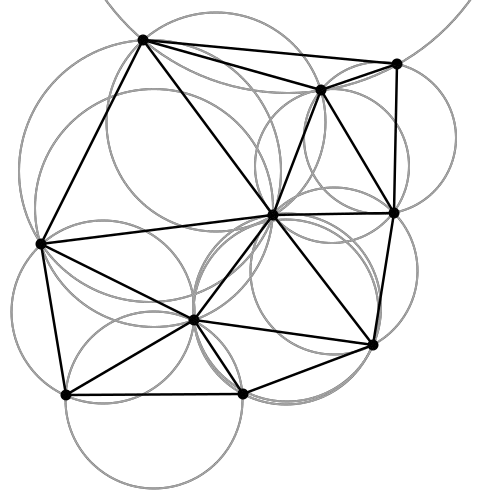
Delaunay 三角剖分是对平面有限点集P的三角剖分DT,P中的点不在任意一个DT三角形外接圆里。 它满足两个重要准则:
-
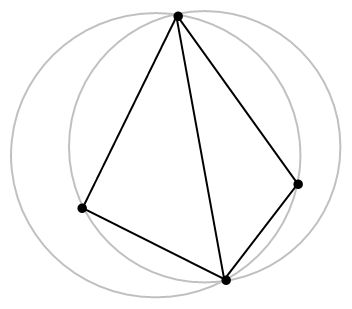
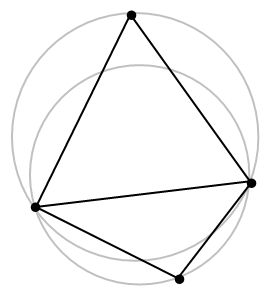
空圆特性。Delaunay 三角网是唯一的(任意四点不能共圆),在 Delaunay 三角形网中任一三角形的外接圆范围内不会有其它点存在。如下图:
-
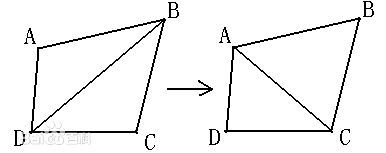
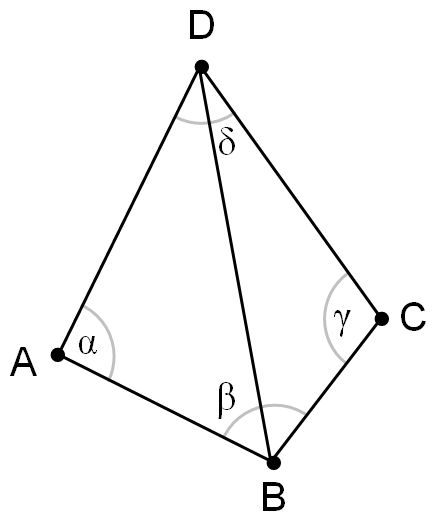
最大化最小角特性。在散点集可能形成的三角剖分中,Delaunay三角剖分所形成的三角形的最小角最大。如下图:
Delaunay 一词是为了纪念 Boris Delaunay 在 1934 年在这方面做的贡献。
粗略定义就是这样,Delaunay 三角剖分有一些很优异的性质:
- 最接近的点形成三角形
- 唯一性,无论何种算法,最后得到的 Delaunay 三角剖分是唯一的
- 最规则,由最大化最小角特性可以推出,Delaunay三角网是“最接近于规则化的”的三角网
- 所有三角形并集为点集的凸包(这个所有剖分都是哈 -_-b)
算法
常规算法有 Flip 算法,Incremental 算法,Divide and conquer 算法,Sweepline 算法等。
Flip 算法
Flip 算法基于一个思想,就是 Lawson 提出的局部优化过程 LOP(Local Optimization Procedure),一般三角网经过 LOP 处理,即可确保成为 Delaunay 三角网。 LOP过程如下:
- 将两个具有共同边的三角形合成一个多边形。
- 以最大空圆准则作检查,看其第四个顶点是否在三角形的外接圆之内。
- 如果在,修正对角线即将对角线对调,即完成局部优化过程的处理。
这样我们从任意一个三角剖分开始,检查非 Delaunay 边,反转边,直到符合 Delaunay 三角剖分为止。这个算法效率较差,不能推广到高维。
Incremental 算法
这不是一个算法,是一类算法。这类算法很直观,依次插入点,重新计算受影响的部分。
直接的增量算法
- 构造一个大三角形,包含点集
- 依次插入点集中的点,插入时将一个三角形分成3个,遍历所有三角形,用 LOP 过程处理非 Delaunay 三角形
- 最后移除第一步中插入的三个点及其所在的三角形即得结果
查找点在哪个三角形里面需要遍历所有三角形,反转也至多反转所有三角形,所以算法上限是$O(n)$。但是一般情况下,若是随机插点的话, 只有$O(1)$的三角形需要反转,故实际效率会好一点。
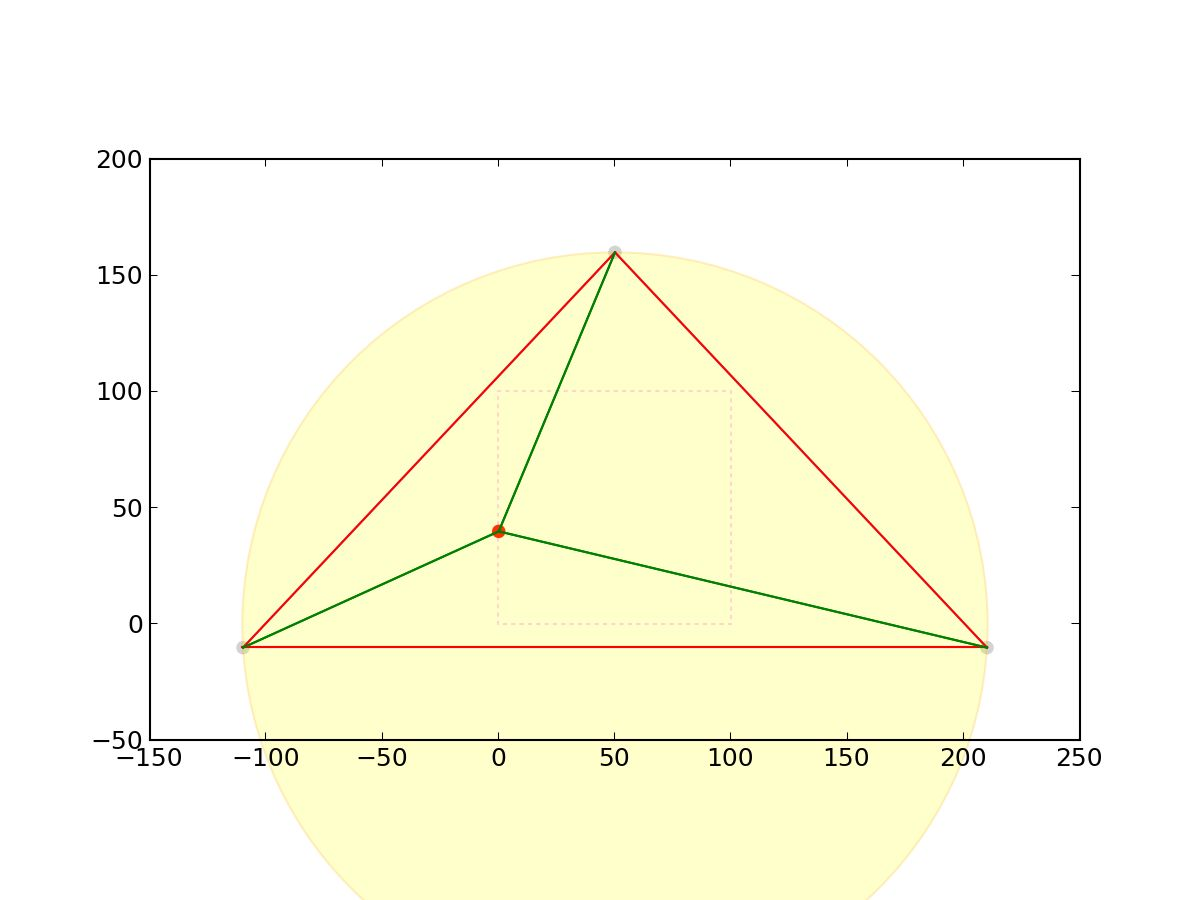
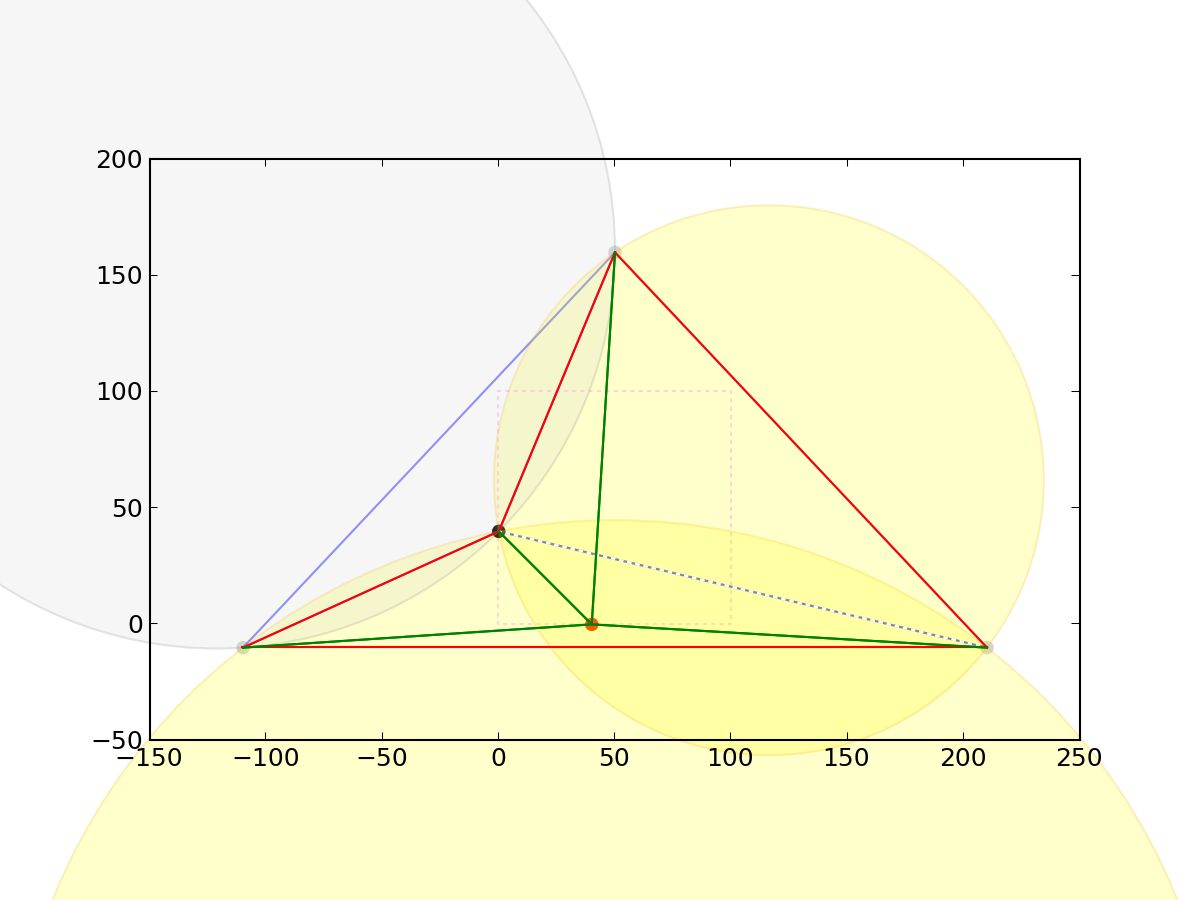
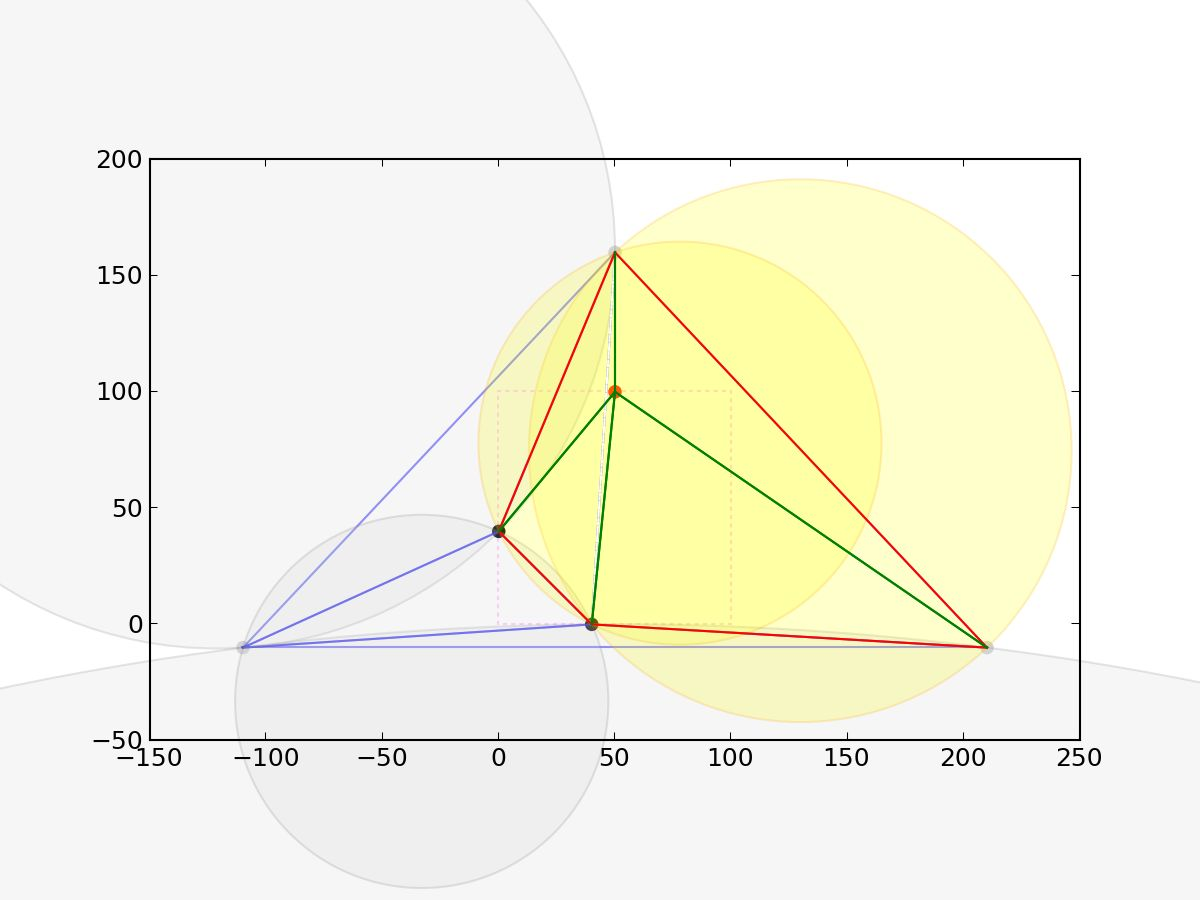
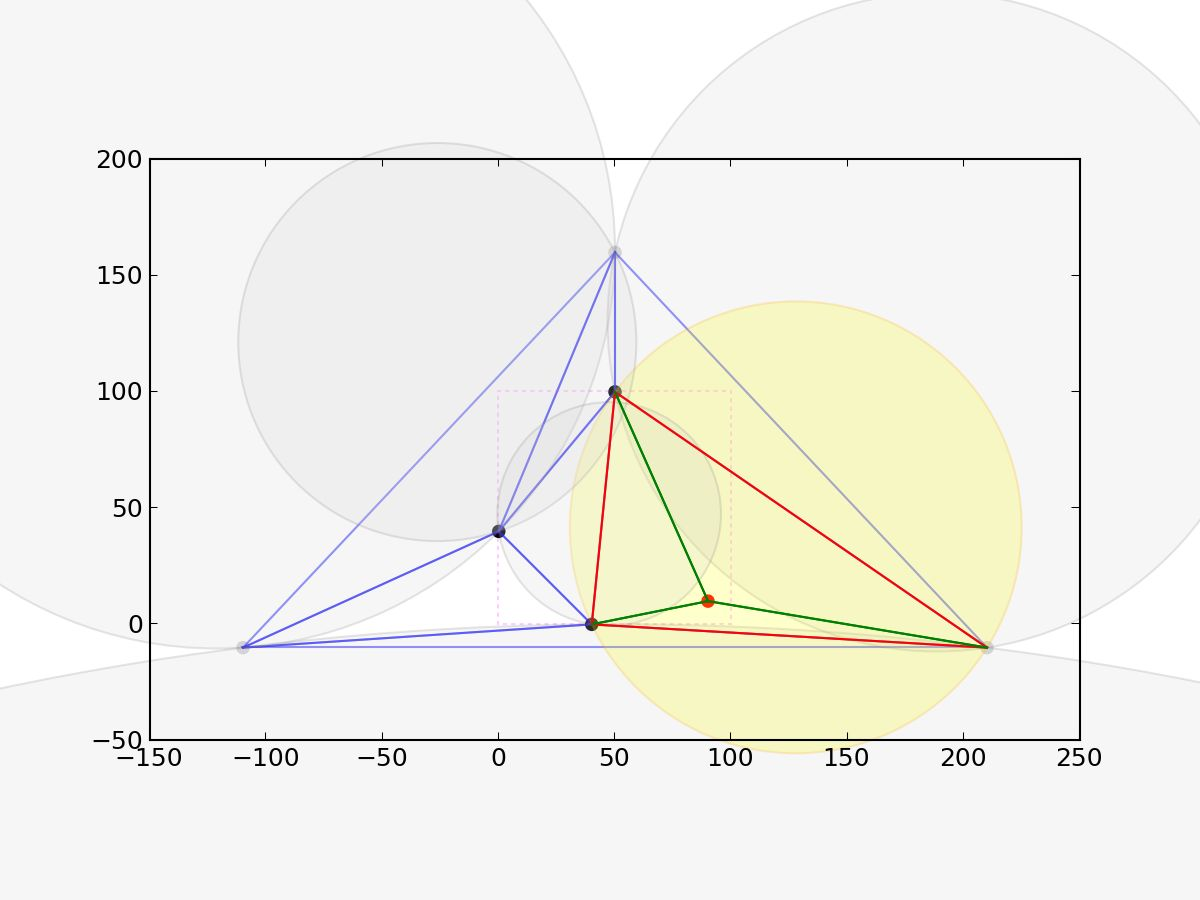
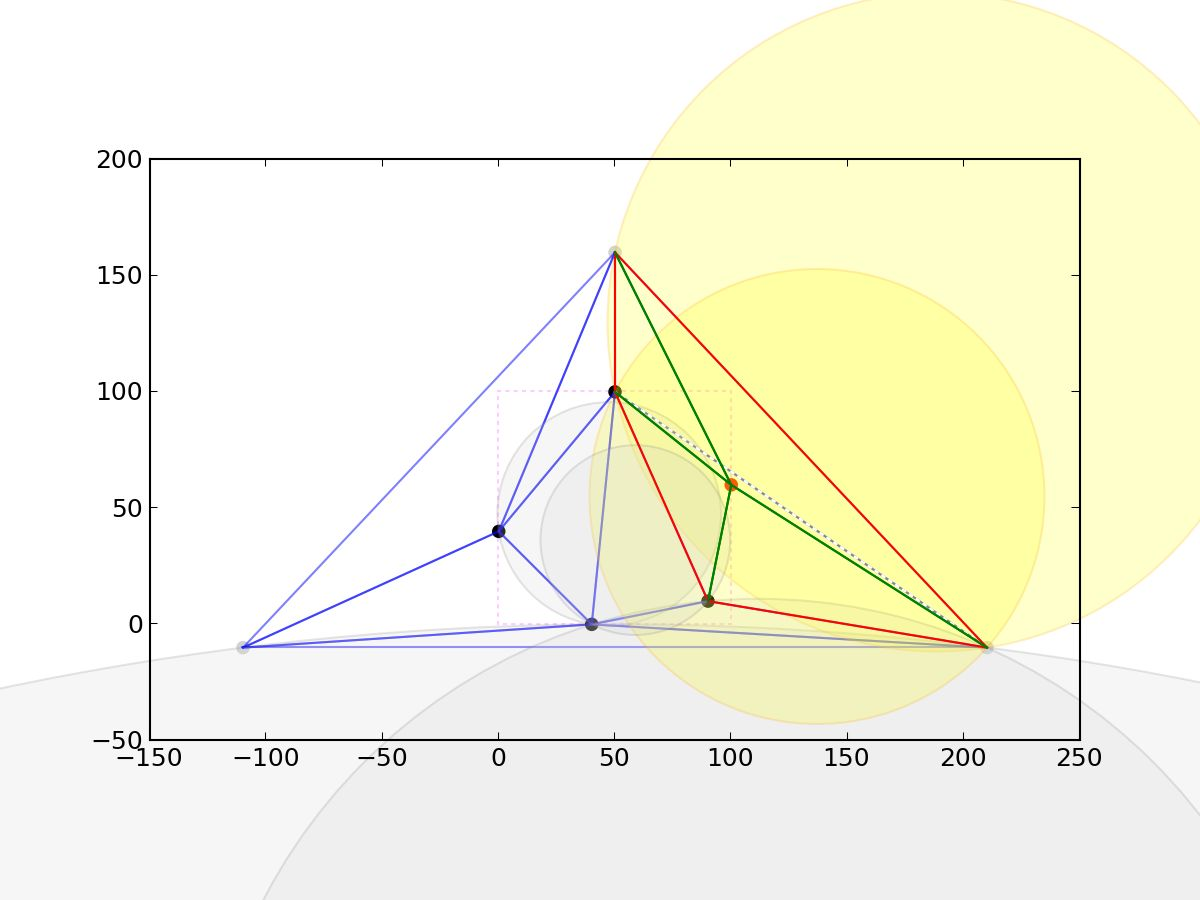
Bowyer–Watson 算法
该算法和上面的算法类似,只有在插点时有些不同:
- 构造一个大三角形,包含点集
- 依次插入点集中的点,去掉外接圆包含插入点的三角形,留出一个星形空洞,连结插入点和空洞边上的点,重新剖分
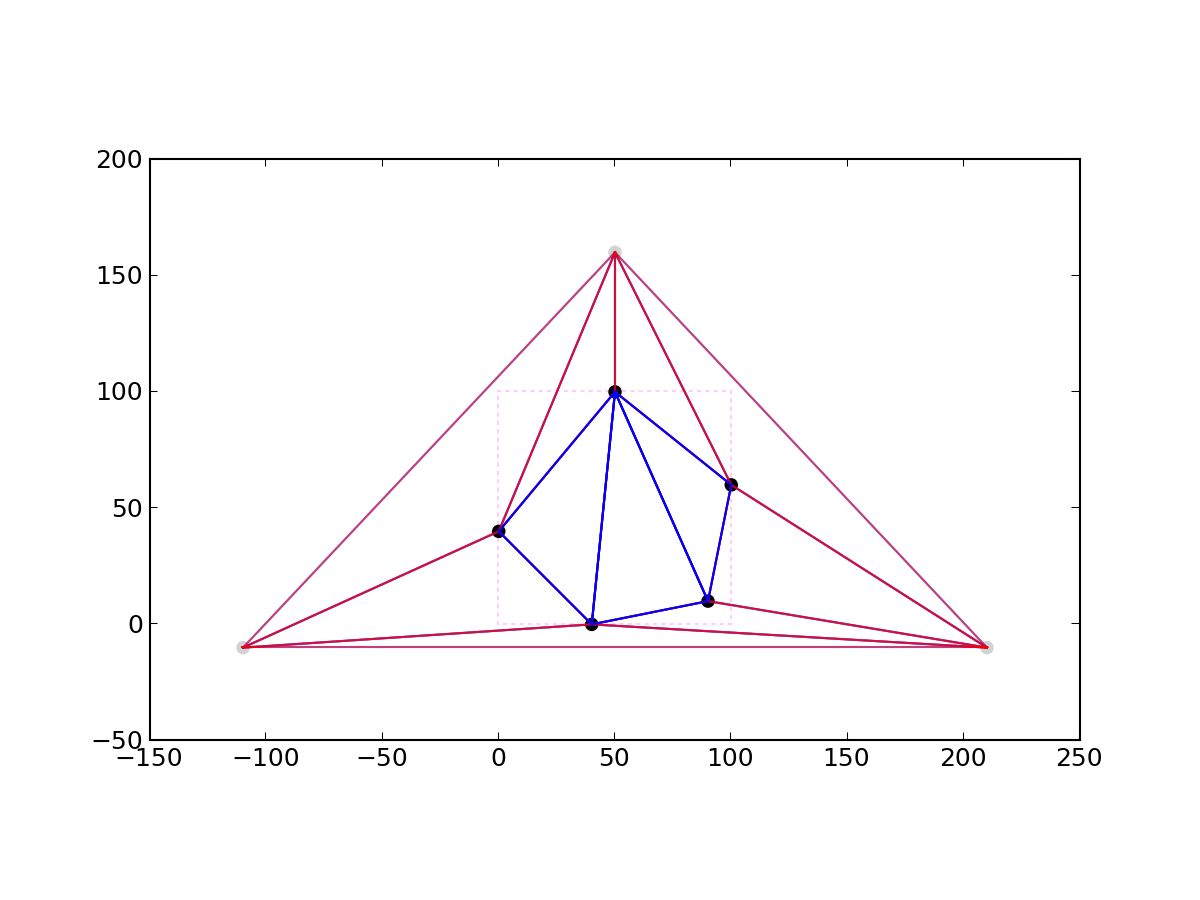
- 最后移除第一步中插入的三个点及其所在的三角形即得结果
看一个实际例子,黄色圆是受影响的三角形的外接圆:
分治法
基本思路是递归分割点集,到点很少的时候,比如3个,这个 Delaunay 剖分就是三点连线。然后把剖分结果沿分隔线合起来。 和起来的过程也可以使用 LOP 消除非 Delaunay 三角形。
有机会以后再讨论这个算法,其中 DeWall 算法是目前 Delaunay 剖分最快的算法。
Sweepline 算法
扫描线算法先将点集按某一维排序,比如$x$,然后用平行另一维的直线依次扫描点集,动态构建剖分。
结尾
二维的算法就介绍到这里,其实里面有些算法是可以推广到高维的。下次再介绍一下约束的 Delaunay 三角剖分以及三维的四面体剖分。