凸包 Gift wrapping 算法(2D)
开始干正事了。。。最近整理一个四面体剖分的串讲,准备从 2D 的 Delaunay 三角剖分开始讲, 索性就把凸包也顺便介绍一下吧。
这篇开个头,讲讲凸包的经典算法系列,计划一篇一个算法。
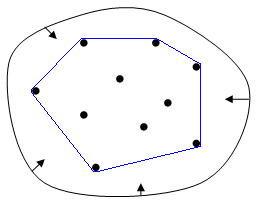
所谓凸包,就是给定二维平面上的点集,将最外层的点连接起来构成的凸多边型,严谨的定义咱就不说了, 如下图(图都是从维基百科上偷来的 (>.<) ):
凸包算法已经十分成熟,有名的算法有 Gift wrapping, Graham scan, QuickHull, Divide and conquer, Monotone chain, Incremental convex hull algorithm, The ultimate planar convex hull algorithm, Chan’s algorithm 等。
本篇介绍第一个算法: Gift wrapping 。这个算法是凸包算法里面最简单的算法之一,1970 年就被提出来了。 又叫做 Jarvis march 算法。
不知道大家第一次听到凸包会想怎么去求,我第一印象就是平面上钉了有一堆钉子(点集),然后我们用线拴住 最外面任意一个,拉紧绳子沿着外延绕一圈,就可以得到这堆钉子的凸包。
OK,原理介绍完了。。。看图:
如上图:
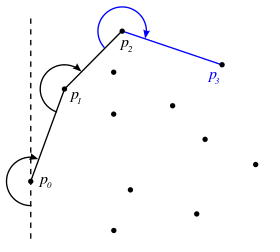
- 首先我们选择一个一定在凸包上的点,这个点最简单的就是找最上,最下,最左或最右的点,上图使用了最左边的点;
- 假如挑最左边的点,所有点都在选定点的右边,用一条竖直的射线向右扫描,可以找到第二个点;
- 取最近找到的两个点,比如 $p_0$,$p_1$,所有点一定在他们连线的右边,用连线所在直线沿 $p_1$ 向右扫描,可以找到下一个点;
- 直到找到起始点,凸包就找到了。
不难发现,扫描过程其实是遍历所有的点,求向量夹角得到的,取上图中 $p_0$,$p_1$ 为例子,$\vec{p_0 p_1}$ 为起始方向, 我们要找一个 $p_2$ 使得 $\vec{p_0 p_1}$ 和 $\vec{p_1 p_2}$ 的夹角最小,这样我们就找到了最边上的点。
如果总共有 $n$ 个点,最后的凸包上有 $h$ 个点,由于每个凸包上点都需要遍历所有的点,该算法的时间复杂度为 $O(nh)$, 最坏的情况是 $O(n^2)$,此时所有点都在凸包上。所以如果凸包上的点数量很少时,这个算法还是很快的。
实现如下
/**
* gift_wrapping algorithm to calculate convex hull
*/
std::vector<Point> gift_wrapping(const std::vector<Point>& pts)
{
std::vector<Point> hull;
// too little points, the original set is a "cenvex hull"
if (pts.size() <= 3) {
hull.insert(hull.begin(), pts.begin(), pts.end());
return hull;
}
// find the first point on the convex hull, here I use the leftmost one
static const REAL MAX_REAL = std::numeric_limits<REAL>::max();
Point leftmost(MAX_REAL, MAX_REAL);
for (unsigned long i = 0; i < pts.size(); ++i) {
if (leftmost.x > pts[i].x) {
leftmost = pts[i];
}
}
hull.push_back(leftmost);
// p0, p1, p2
Point p0(leftmost.x, leftmost.y - 1),
p1 = leftmost,
p2,
p_cur;
Vector vec_left, vec_right;
REAL max_cos = -1.1, cur_cos;
while (true) {
max_cos = -1.1;
vec_left.set(p0, p1);
for (unsigned long i = 0; i < pts.size(); ++i) {
p_cur = pts[i];
if (p_cur == p1) {
continue;
}
vec_right.set(p1, p_cur);
cur_cos = Vector::cosAngle(vec_left, vec_right);
if ((cur_cos > max_cos) || (cur_cos == max_cos &&
((std::fabs(vec_right.x) > (std::fabs(p2.x - p1.x))) ||
(std::fabs(vec_right.y) > (std::fabs(p2.y - p1.y)))))) {
max_cos = cur_cos;
p2 = p_cur;
}
}
// convex hull found
if (p2 == hull[0]) {
break;
}
hull.push_back(p2);
// to find next
p0 = p1;
p1 = p2;
}
return hull;
}
这个算法可以推广到更高维,等下次再贴一个 3D 的实现上来。